Visual Swarm (VSWRM)
A purely vision-based decentralized controller for swarming robots
 Collective movement is a widely observed phenomenon in nature. Be it schools of fish,
flocks of birds or swarms of insects, animals can implement well-coordinated collective movement
relying only their perception, i.e. the locally available information surrounding them. Current flocking models
often rely on, instead of local, global information such as the exact position of conspecifics.
How does collective motion arise only from local perception? Is it possible to create a purely
vision-based controller for robots that implements similarly coordinated movement?
Collective movement is a widely observed phenomenon in nature. Be it schools of fish,
flocks of birds or swarms of insects, animals can implement well-coordinated collective movement
relying only their perception, i.e. the locally available information surrounding them. Current flocking models
often rely on, instead of local, global information such as the exact position of conspecifics.
How does collective motion arise only from local perception? Is it possible to create a purely
vision-based controller for robots that implements similarly coordinated movement?
 To study these questions we implemented a novel vision-based flocking model introduced
by Bastien and Romanczuk in both
simulated agents and in 10 small terrestrial robots. We studied the following:
To study these questions we implemented a novel vision-based flocking model introduced
by Bastien and Romanczuk in both
simulated agents and in 10 small terrestrial robots. We studied the following:
- How does a limited FOV influence the original vision-based flocking model?
- How does the model perform in a constrained environment (walls)?
- How does the model perform on real robots with a fully decentralized design?
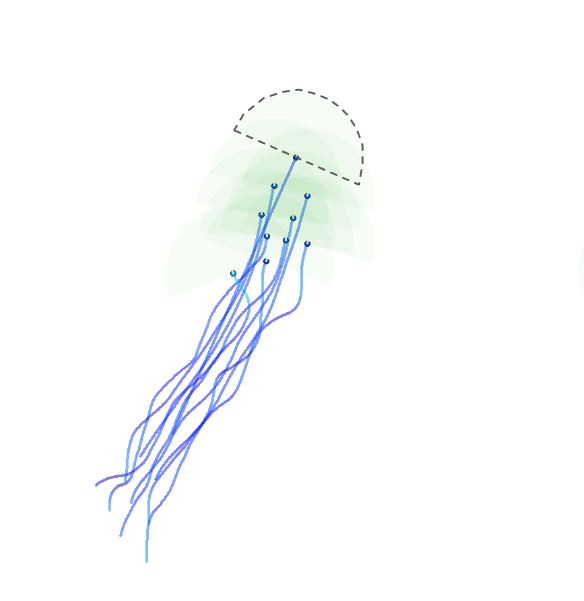 We found in simulations that limiting the visual perception of individuals fundamentally changes
the resulting movement patterns, and less visual information sometimes even favors
coordinated movement. Combining our findings with limited spaces, on the other hand,
always made it more challenging for groups to realize coordinated migrating movement
without collisions as in these cases agents are continuously perturbed by limiting walls.
We found in simulations that limiting the visual perception of individuals fundamentally changes
the resulting movement patterns, and less visual information sometimes even favors
coordinated movement. Combining our findings with limited spaces, on the other hand,
always made it more challenging for groups to realize coordinated migrating movement
without collisions as in these cases agents are continuously perturbed by limiting walls.
We also found that the smaller the agents' FOV is the less cohesive the group remains
as agents can break away from the group if no other agent is visible.
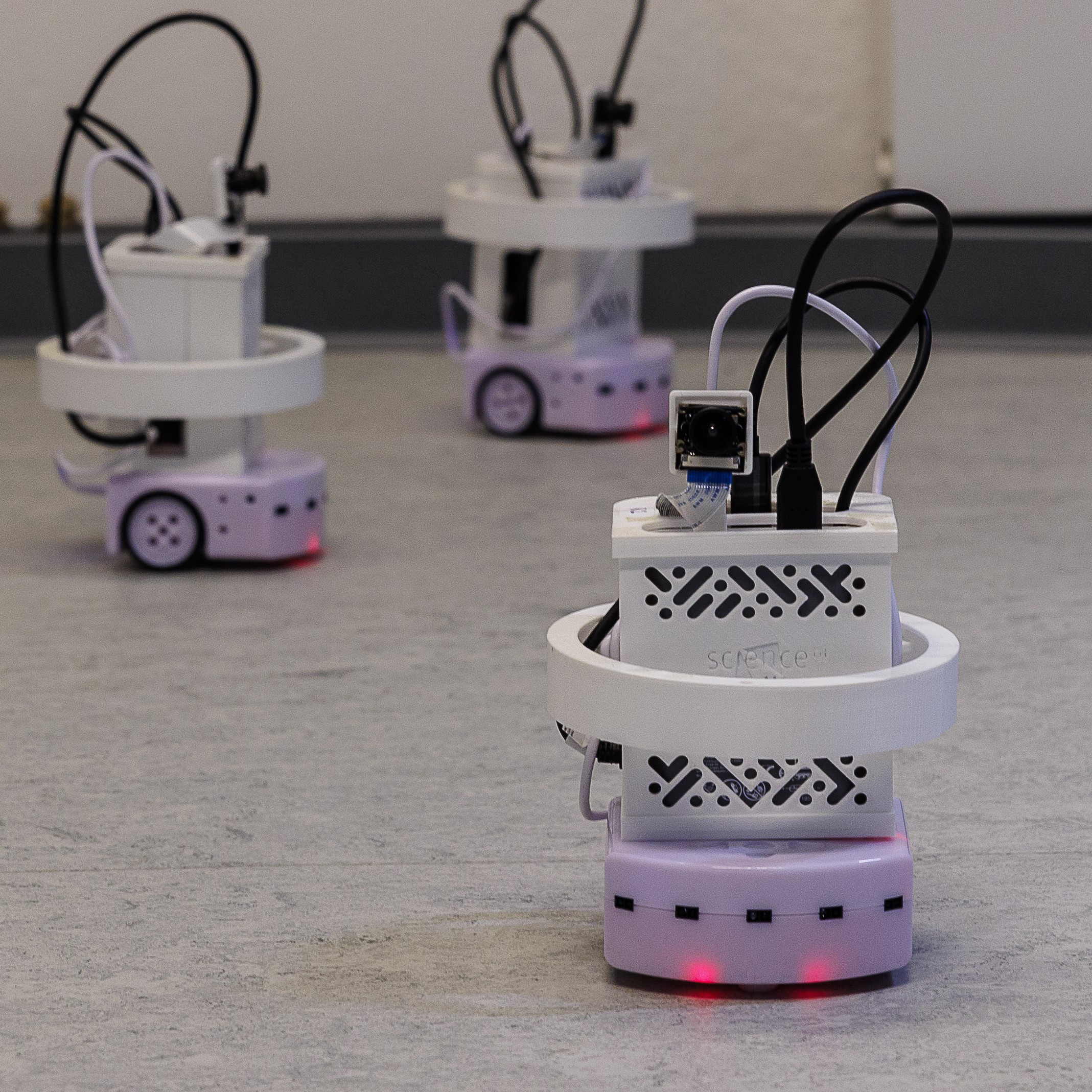
 Using our results from simulations involving agent-based models, we developed a
vision-based controller for small robots. This controller enables the robots to
achieve coordinated movement without the need for any centralized control system.
The robots can move in unison by solely relying on their camera feeds to process all
necessary information on-board, including the detection of each other through CNN-based
object detection methods. Decentralized control could offer significant advantages
over centralized systems in the future. Robots that rely solely on local information
are more resilient to disruptions in global information systems, such as GPS jamming
or outages. Moreover, the agents do not require direct communication with each other,
facilitating coordinated movements among various types of robots without the need for
a compatible communication protocol.
Using our results from simulations involving agent-based models, we developed a
vision-based controller for small robots. This controller enables the robots to
achieve coordinated movement without the need for any centralized control system.
The robots can move in unison by solely relying on their camera feeds to process all
necessary information on-board, including the detection of each other through CNN-based
object detection methods. Decentralized control could offer significant advantages
over centralized systems in the future. Robots that rely solely on local information
are more resilient to disruptions in global information systems, such as GPS jamming
or outages. Moreover, the agents do not require direct communication with each other,
facilitating coordinated movements among various types of robots without the need for
a compatible communication protocol.
For more information see our manuscript here:
[Preprint] David Mezey, Renaud Bastien, Yating Zheng, Neal McKee, David Stoll, Heiko Hamann, Pawel Romanczuk
Purely vision-based collective movement of robots
arXiv:2406.17106; doi: https://doi.org/10.48550/arXiv.2406.17106