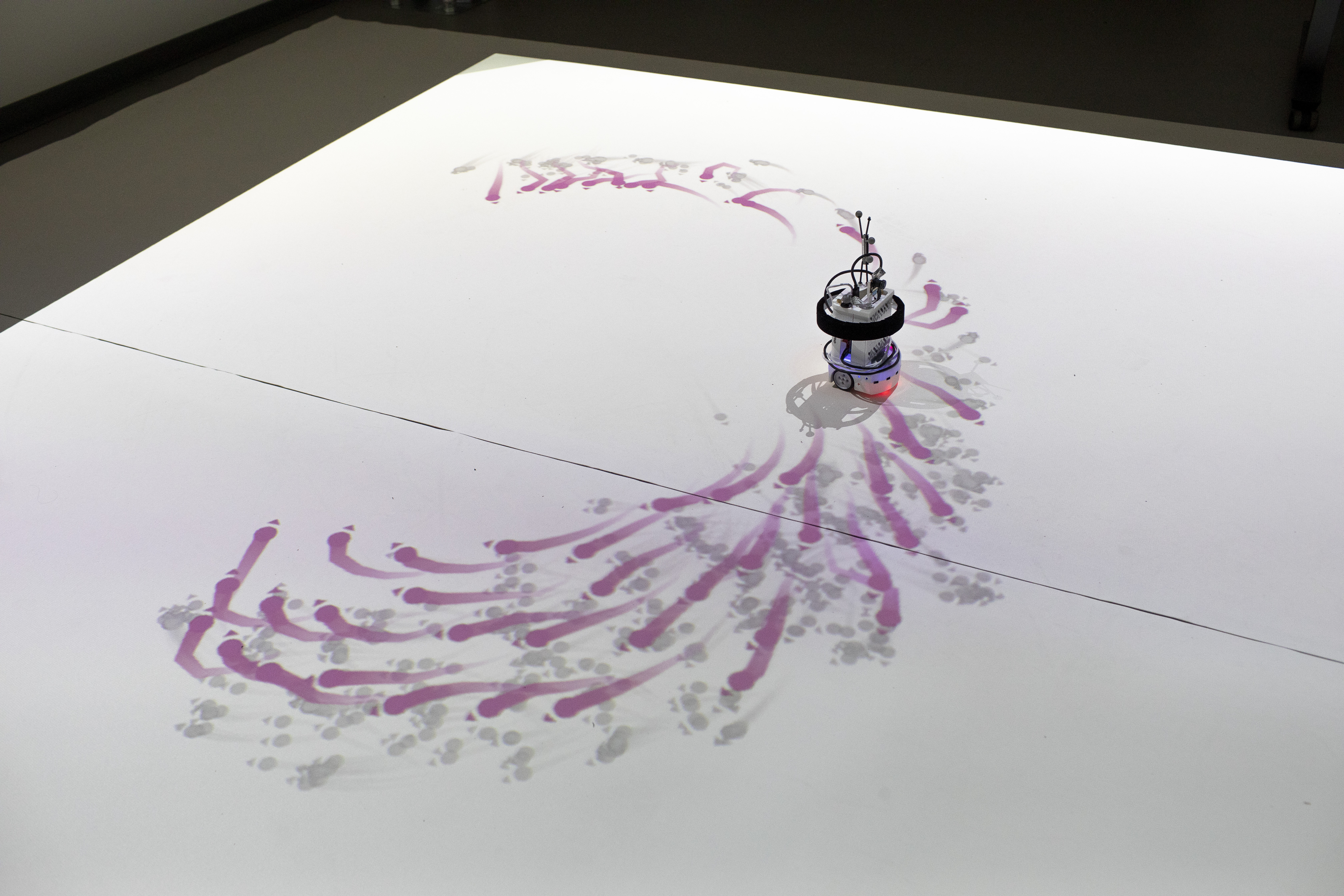
CoBe : Collective Behavior
Collective behavior is often studied across various scales and environments, using both mathematical models with subsequent
agent-based simulations and observations of biological agents.
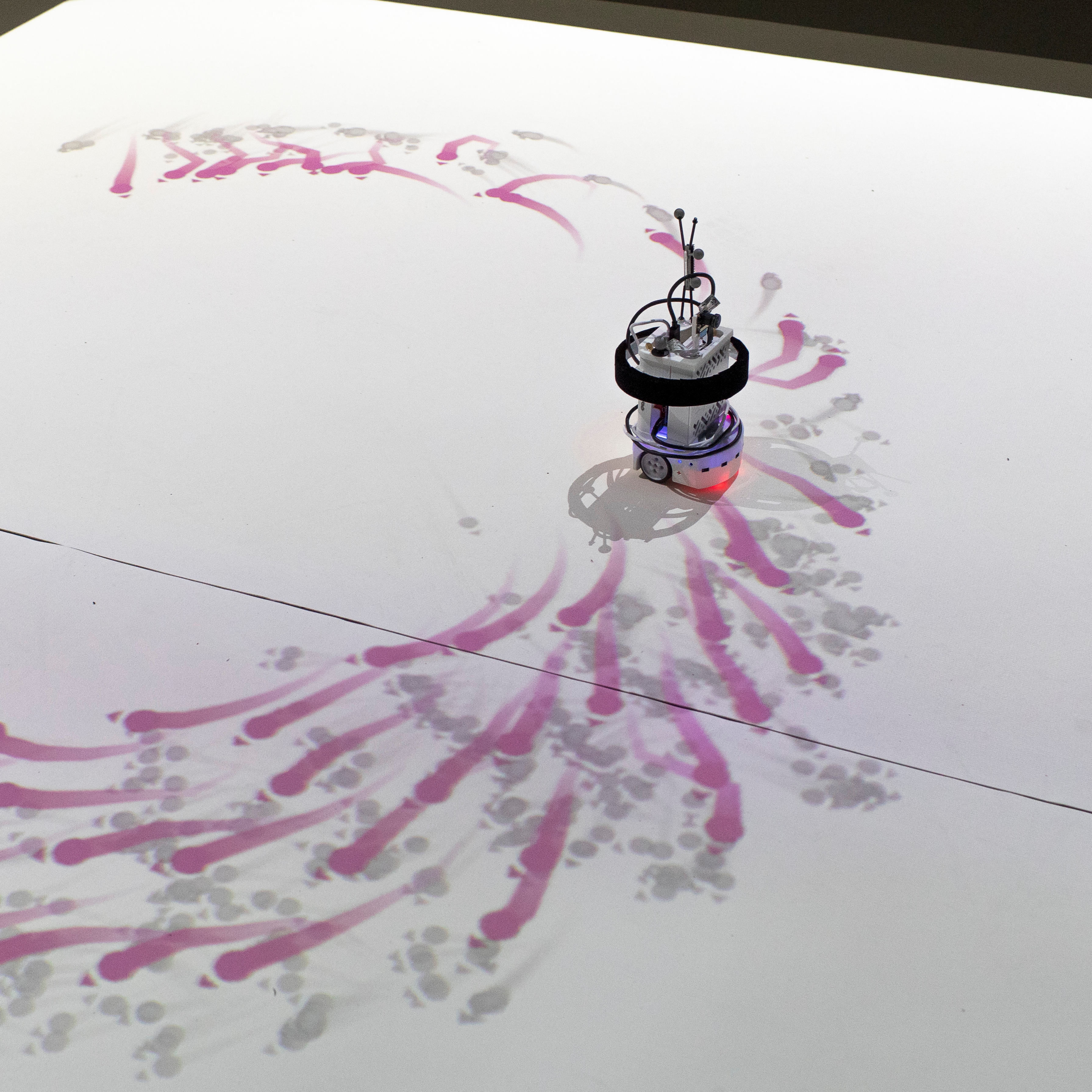
Motivated by synthetic collective intelligence, these models serve as a foundation for designing artificial agents, such as robots.
These agents are used to test the model's robustness in the physical world and to achieve practical applications.
Throughout this workflow, numerous environmental gaps emerge that must be bridged: from observations of animals in the physical world to simulated agents, and then back
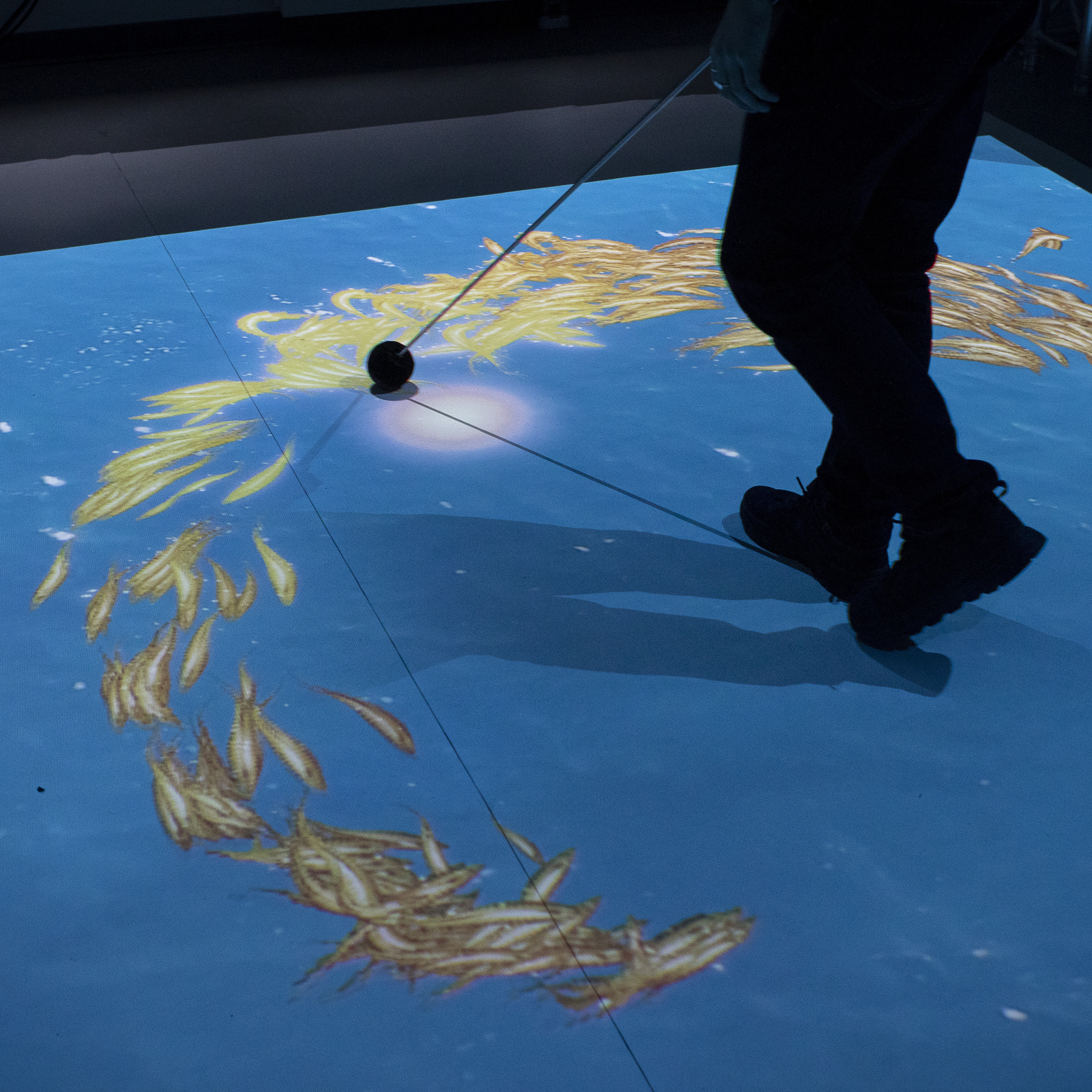
to the physical world with robotic agents. CoBe is a platform designed to bridge these gaps by providing a unified environment for
humans, simulated agents, and robots to explore the role of embodiment in collective behavior.